 ET
ET  EN
EN 
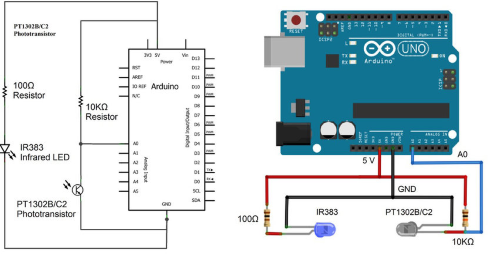
IR diood + reciver Paigutatud ritta: IR phototransistor + diode + phototransistor,
Keskel paiknev led > peegeldus tagasi kahele transistorile.
asend nii lähedal kui võimalik (praktiliselt tsentrid 10 mm)
dioodiel R220
Phototransistori ette 10K
AnalogRead() kiirendi:
http://yaab-arduino. … om-analog-input.html
/* Kronograaf, 31.3.19 */
int t0 = 100; // analog read lasu registreerimise tase a0
int t1 = 100; // analog read lasu registreerimise tase a1
int t2 = 100; // analog read lasu registreerimise tase a2
int t3 = 100; // analog read lasu registreerimise tase a3
int x = 10; // sensitiivsuse koef
unsigned long aeg1 = 0; // lasu alghetk micros()
float aeg = 0; // lennuaeg micros
float v = 0; // arvutatud kiirus
float fps = 0; // arvutatud kiirus 1m/s = 3.28084 fps
unsigned long a0 = 0; // 1. sensor a0 value
unsigned long a1 = 0; // 1. sensor a1 value
unsigned long a2 = 0; // 2. sensor a2 value
unsigned long a3 = 0; // 2. sensor a3 value
String r1 = ""; // string LCD rida 1
unsigned int d = 0; // delay in microsecond (min is 3)
float L = 0.305; // sensorite vaheline kaugus
int w = 1000000; // lasu ootamine = 1 sek.
int i = 0; //
boolean s = false; // lask true/false
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
//LCD
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h> // F Malpartida's NewLiquidCrystal library
#define I2C_ADDR 0x20 // Define I2C Address for the PCF8574A
#define BACKLIGHT_PIN 7
#define En_pin 4
#define Rw_pin 5
#define Rs_pin 6
#define D4_pin 0
#define D5_pin 1
#define D6_pin 2
#define D7_pin 3
#define LED_OFF 0
#define LED_ON 1
LiquidCrystal_I2C lcd(I2C_ADDR, En_pin, Rw_pin, Rs_pin, D4_pin, D5_pin, D6_pin, D7_pin);
void setup() {
// kiirus-set prescale to 16
sbi(ADCSRA, ADPS2) ;
cbi(ADCSRA, ADPS1) ;
cbi(ADCSRA, ADPS0) ;
Serial.begin(115200);
// LCD
lcd.begin (16, 2);
lcd.setBacklightPin(BACKLIGHT_PIN, NEGATIVE);
lcd.setBacklight(LED_ON);
lcd.setCursor(0, 0);
lcd.print("Setup() ...");
delay(1000);
out();
lcd.setCursor(0, 0);
lcd.print("Ootan lasku ....");
}
void out() {
for (i = 0; i < 20; i ++) {
a0 = a0 + analogRead(A0);
delayMicroseconds(d);
a1 = a1 + analogRead(A1);
delayMicroseconds(d);
a2 = a2 + analogRead(A2);
delayMicroseconds(d);
a3 = a3 + analogRead(A3);
delayMicroseconds(d);
delay(100);
}
a0 = a0 / i;
a1 = a1 / i;
a2 = a2 / i;
a3 = a3 / i;
t0 = a0 + x;
t1 = a1 + x;
t2 = a2 + x;
t3 = a3 + x;
ser();
}
void ser() {
Serial.print("t0= ");
Serial.println(t0);
Serial.print("t1= ");
Serial.println(t1);
Serial.print("t2= ");
Serial.println(t2);
Serial.print("t3= ");
Serial.println(t3);
Serial.print("a0= ");
Serial.println(a0);
Serial.print("a1= ");
Serial.println(a1);
Serial.print("a2= ");
Serial.println(a2);
Serial.print("a3= ");
Serial.println(a3);
Serial.print("v= ");
Serial.print(v, 1);
Serial.println(" m/s");
Serial.print("v= ");
Serial.print(fps, 0);
Serial.println(" fps");
Serial.println("-------");
}
void kuva() {
lcd.clear();
lcd.home();
lcd.backlight();
lcd.setCursor(0, 0);
lcd.print("***** LASK *****");
lcd.setCursor(0, 1);
r1 = String("V = " + String(v, 0) + " m/s " + String(fps, 0));
lcd.print(r1);
delay(10000);
lcd.setCursor(0, 0);
lcd.print("Ootan lasku ....");
}
void loop() {
a0 = analogRead(A0);
delayMicroseconds(d);
a1 = analogRead(A1);
delayMicroseconds(d);
if (a0 > t0 || a1 > t1 ) {
aeg1 = micros();
while ((micros() - aeg1) < w && s == false) {
a2 = analogRead(A2);
delayMicroseconds(d);
a3 = analogRead(A3);
delayMicroseconds(d);
if (a2 > t2 || a3 > t3 ) {
s = true;
aeg = (micros() - aeg1);
v = L / (aeg / 1000000);
fps = v * 3.28084;
kuva();
out();
s = false;
} else {
t2 = a2 + x;
t3 = a3 + x;
}
}
} else {
t0 = a0 + x;
t1 = a1 + x;
}
}